Nous allons présenter ici rapidement l'échange d'informations entre la micro:bit et :
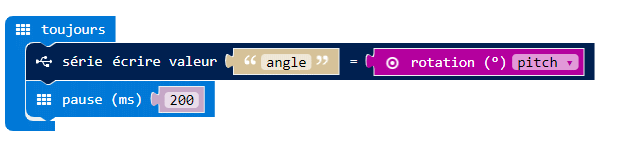
Nous allons prendre comme exemple l'envoi par la micro:bit de l'information de pitch grâce au programme suivant à charger sur la carte :
On peut aussi utiliser le programme micro:python équivallent :
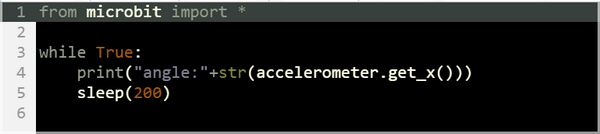
Dans ce programme, l'instruction print envoie directement sur la liaison série. Si vous souhaitez aller plus loin dans l'utilisation de la liaison série il faut se pencher sur le module UART
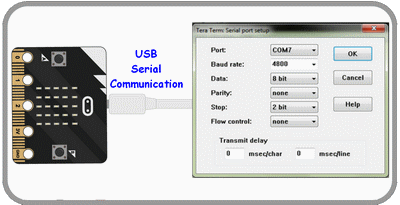
La liaison série va se faire au travers du cable USB. Il vous faut donc raccorder votre carte micro:bit au PC via un cable USB
Sous Windows votre carte va être raccordée via un port série. Windows nomme ces ports avec un nom du type COM1,COM2,COM3,etc. Il vous faut savoir sous quel port votre carte micro:bit est raccordée. Pour cela le plus simple est d'ouvrir une console Windows (cmd) puis de taper la commande mode Vous devriez voir apparaître le nom de votre port COM et son numéro.
Lancer le logiciel puis :
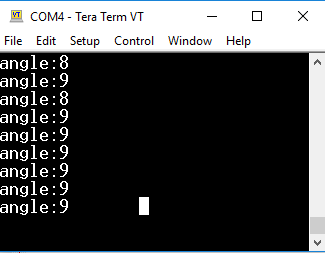
Si tout est ok vous devez voir apparaître sur la console de TeraTerm la valeur du pitch de la carte. Bougez la carte pour voir les variations !
Voici un exemple de programme : (Pensez à modifier le nom du port COM !)
import time
import serial
print(serial.VERSION)
ser = serial.Serial(
port='COM4',\
baudrate=115200,\
parity=serial.PARITY_NONE,\
stopbits=serial.STOPBITS_ONE,\
bytesize=serial.EIGHTBITS,\
timeout=0)
print("connected to: " + ser.portstr)
count = 0
while True:
ser.flushInput()
time.sleep(0.1)
line = ser.readline().rstrip().decode()
tokens = line.split(':')
if len(tokens)==2:
print(str(count)+":"+tokens[0]+"-->"+tokens[1]+"["+line+"]")
count +=1
ser.close()
Pour info l'instruction ser.flushInput() permet de vider le buffer pour récupérer la valeur la plus récente de pitch. Cette instruction est biensûr optionnelle et dépend de la gestion du flux que vous souhaitez réaliser.
In Python 3.x the strings are Unicode by default. When sending data to Arduino, they have to be converted to bytes. This can be done by prefixing the string with b:
>>> ser.write(b'5') # prefix b is required for Python 3.x, optional for Python 2.x
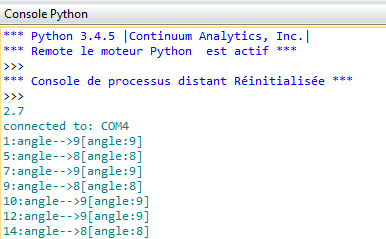
Voici le résultat de l'execution sur la console Python :
Voici la procédure à suivre pour l'installation :
N'hésitez pas à consulter p5jsServer sur un serveur node en local pour plus de détail sur node.js
Je vous laisse étudier le code associé : server.js pour le serveur node et sketch.js dans le répertoire public pour la page web sous p5js.
Il s'agit d'une fonctionnalité béta
N'hésitez pas à consulter web USB ticket from microbit pour plus de détails. ou encore microbit Web USB