
carte BBC micro:bit
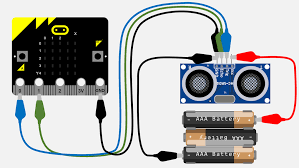
Utilisation d'un capteur ultrason
Pour mesurer une distance
Utilisation d'un capteur ultrason
Pour mesurer une distance
# -*- coding: utf-8 -*-
"""
== Programme de mesure de distance d’un module ultrason à 3 broches ==
"""
from microbit import *
from utime import ticks_us, sleep_us
sonar = pin2
def getDistance():
sonar.write_digital(1) # Send 10us Ping pulse
sleep_us(10)
sonar.write_digital(0)
# Wait until the pulse starts
while sonar.read_digital() == 0:
pass
start = ticks_us() # define starting time
# Wait for Echo pulse to return
while sonar.read_digital() == 1:
pass
end = ticks_us() # define ending time
echo = end-start
distance = int(0.01715 * echo ) # Calculate cm distance
return distance
while True:
if button_a.was_pressed(): # bouton A pour effectuer une mesure
dist = getDistance()
print(dist) # retour REPL dans la console de l'éditeur
display.scroll('%s cm' % dist)
sleep_us (2000)
 (
Christophe Béasse - Mai 2019 )
(
Christophe Béasse - Mai 2019 )